


Features
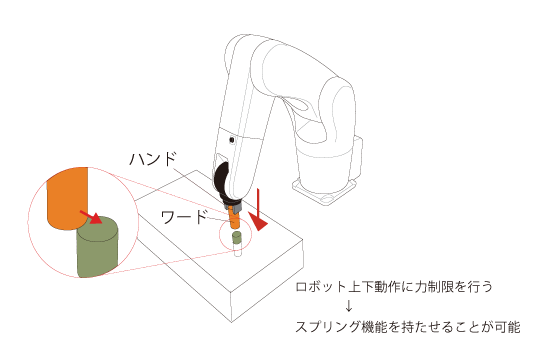
This function can use a reaction force on the motor from each axis for control to absorb misalignment. It is effective for work accompanied by contact with other objects such as the butt-joining of two parts or the fitting of a part into another part