


Features
WINCAPS III is a software application that supports all processes from consideration of introduction to maintenance of DENSO robots. With its abundant functions, it helps users with operation of DENSO robots, such as robot programming, controller data backup and robot posture checking on a 3D screen.
Functions

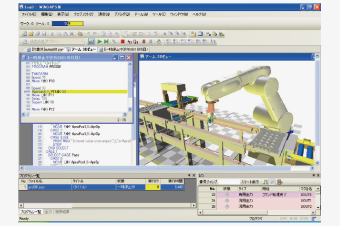
Programming
Robots can be programmed on the program
editing window. The following functions are
offered:
- Line number display
- Command color display
- Command entry support
- (displaying candidates for entry)
- Indentation
- Comment block
- Bookmark

Simulation function
By running a program made by the user on
a PC, cycle time, robot motion, posture,
interference, etc. can be checked.
- Program start/stop, break points
- Variable, I/O display and editing
- Check for interference
- Cycle time measurement
- Robot trajectory display

Control board editor
The control board screen for the teaching
pendant can be edited on a PC
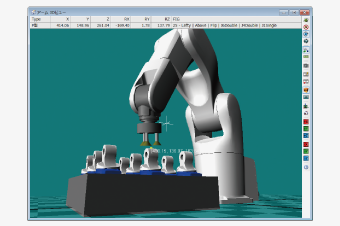
3D arm view
By displaying robots and peripheral devices
three-dimensionally, robot motions can be
simulated on a PC.
- 3D graphic data importing (VRML, DirectX format)
- Clicking an object with a mouse can move to the leading-end object of the robot and obtain the location data. [3D view teaching]

Log function
The following logs can be displayed.
- Error log
- Operation log
- Trace log
- Control log [command value, encoder value, current value, load factor, etc. on each axis]
- Variables [PRO name, variable name, type, written value, write source, etc.]
- I/O log [port, type, status, initial value]
- Servo single axis data log [speed command value, actual speed, torque command value, angle deviation, current absolute value]
Online function
By connecting with a robot controller,
the following functions can be used.
[Monitor function]
- 3D view display
- Variable
- I/O
- Program execution
- Log data receipt and storage [Debugging function]
- Robot speed adjustment
- Resetting of all programs
- Start/stop of privileged tasks
- Program start
- Step stop, cycle stop, instantaneous stop, program resetting
- Step execution
- Dummy I/O setting for dedicated input, etc.