


EVP Easy Vision Picking
EVP (Easy Vision Picking) is an image processing application that specializes in Pick & Place without using a program.
Image processing settings are configured using an application (EVP Guidance) on the PC. When executing (EVP Runtime) can be run by RC8 and the camera connected to RC8 only.EVP also includes a calibration wizard that can perform robot calibration and calibration between camera and robot.The picking device has built-in functionality to output the location of parts that are within the field of vision of the robot, allowing control of parts movement via a feeder or other device.
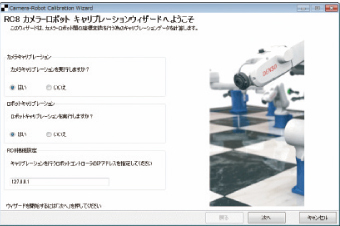
EVP Calibration Wizard
- Simply loading the chess board completes the camera calibration.
- A user simply follows the wizard to complete calibration of the robot and camera.

EVP Guidance
- An image processing flowchart can be configured by easy operation without using a program.
- Multiple models can be registered and recognized even in a mixed product environment.

EVP Runtime
- Results can be shown on the teach pendant during execution, making a PC unnecessary.
- mage processing and communications programs are not needed to output image processing results to the robot position type (P type) variable.
EIS Easy | Image Store
EIS is a software to store the images of cameras connected to RC8.
Images taken by the built-in image processing application (EVP) in RC8 are temporarily stored in RC8, and reset when power is turned off. With EIS, the images can be stored automatically in PC as image files.

Easy connection between the robot controller and the PC
Using the wizard, users can easily connect the robot controller to a PC and set places where images are stored.

Trigger setting
By setting internal I/O numbers of the robot controller and monitoring intervals as triggers, images can be stored with arbitrary timing.

 Download our product overview
Download our product overview